Arduino shield for Raspberry Pi 2 or How to solve problems with PWM, analog input and not burn down the apartment with a soldering iron
I have already published some posts where I told about Raspberry, Arduino and other boards as about boards for your own prototypes. Using these boards you can easily create something before you invite real engineers, who will make a custom board for you based on your needs. And it’s clear that all existing boards have some limitations because it’s simply not possible to create something universal that can satisfy everybody (something small, Windows 10 powered, with 60 analog pins, WiFi on board and what will not require much power). That’s why you can find lots of different micro boards on the market and Microsoft published general requirement for supported hardware but doesn’t focus on specific boards. So, once you make a prototype using available hardware you may start to think about a board which implements all needed features.
But previous paragraph doesn’t answer the question: how to create a prototype using Windows 10 IoT Core and using available boards on the market such as Raspberry Pi 2 if I still cannot use PWM, Analog signals and even some type of digital signals (pulseIn implementation)? The short answer is: keep calm and think about different boards as just a different type of brain.
I am not so strong in biology but I like to catch crabs. If you cook a crab, try to find the brain inside. Frankly speaking, I am not sure if it’s there but according to rumors in Internet it exists. In any case, if somebody asks me to implement a crab, I think that I will use just several capacitors, sensors and the simplest transistors but I will not use any CPUs at all. It’s a simple binary shifter: move all type while food sensor send low signal and change the direction if too much light (light sensor is sending low signal) is available (just go deeper). In Ukraine I keep some hamsters. I am sure that they have brain and I think that ATMega 328P-PU (Arduino Uno chip) will work fine for hamster implementation. In case of dogs it’s better to have something more advanced, faster and with ability to run some scenarios in background – I think that ARM Cortex A7 CPU should be good for this task.
So, select the brain you need. Pay special attention that the same things can have different types of brain due to different number of features. For example, I have a dream to build a drone that will able to find and destroy other drones. Of course, I need a way to use OpenCV, to implement lots of different algorithms etc. In my case, ARM Cortex A7 is must. But if you want to implement a simple RC drone and use CPU just for stabilization algorithm – ATMega will work much better.
Ok. You decided to use Cortex A7 CPU and found Raspberry PI 2 on the market which supports Windows 10 IoT Core. Thanks to Windows 10 I can develop my software very quickly using well known APIs and tools (like Visual Studio). Let’s imagine that you want to build the same drone which will intercept other drones. Of course, it’s easy to use camera, OpenCV and other technologies but stabilization algorithms should be there as well. You need a way to use PWM in order to power brushless motors, read digital signals from RC controller (like manual pilot system etc.). So, we just returned to the initial question: where is PWM…?
Raspberry Pi 2 doesn’t support software PWM. Of course, you can emulate it using software but quality of this emulation will be low and I think that the drone will be self-destructed during the first flight. But I still don’t understand why you don’t ask me about other features which are not available for Raspberry: where is embedded gyroscope? where is embedded WiFi? Where is embedded toaster?
Usually, if you need some sensors you simply buy and attach them to the board. Using I2C, SPI, Serial, you can communicate with all external stuff and implement that you need. So, if you need PWM or analog input, simply attach it.
BTW: By accident I found a Raspberry shield for copters. It’s expensive but it existsJ
I made some research and even published the post about analog input for Raspberry but finally I decided that the best solution for PWM, Analog and digital inputs is Arduino. It was adopted by huge number of developers and it’s easy to find how to implement you code which should work with particular external sensors, shields etc. Of course, Raspberry PI and Arduino board have different form factors and Arduino board cannot be stacked on Raspberry, so I decided to build my own Arduino from scratch and build it like a shield for Raspberry.
Visiting https://www.bc-robotics.com/ which is physically located in Vancouver Island I bought the following things:
ATMega 328P-PU with bootloader (you can buy it without bootloader but you need another Arduino to flash bootloader there)
Some 22 pF capacitors, 0.1uF capacitors and one 10uF capacitor
Additionally, you need to make sure that you have different resistors (at least 10 kOhm and 220 Ohm) at least one led, a button and Serial to USB converter. In case of a converter you need to make sure that it has DTR pin (not just RX and TX) because I have a converter which has CTS pins, so I bought a new oneL
Finally, I spent around 20 Canadian dollars for components. I believe that I could have bought all this things for 10-15 dollars but I am not ready to wait a month for a package from China. In case of BC Robotics I got all these things in 48 hours.
On the next step you need to find a schema how to build own Arduino from scratch. I used this one: https://shrimping.it/blog/shrimp/. I decided to use Protected Shrimp but I simply removed the button from the circuit in order to save some space.
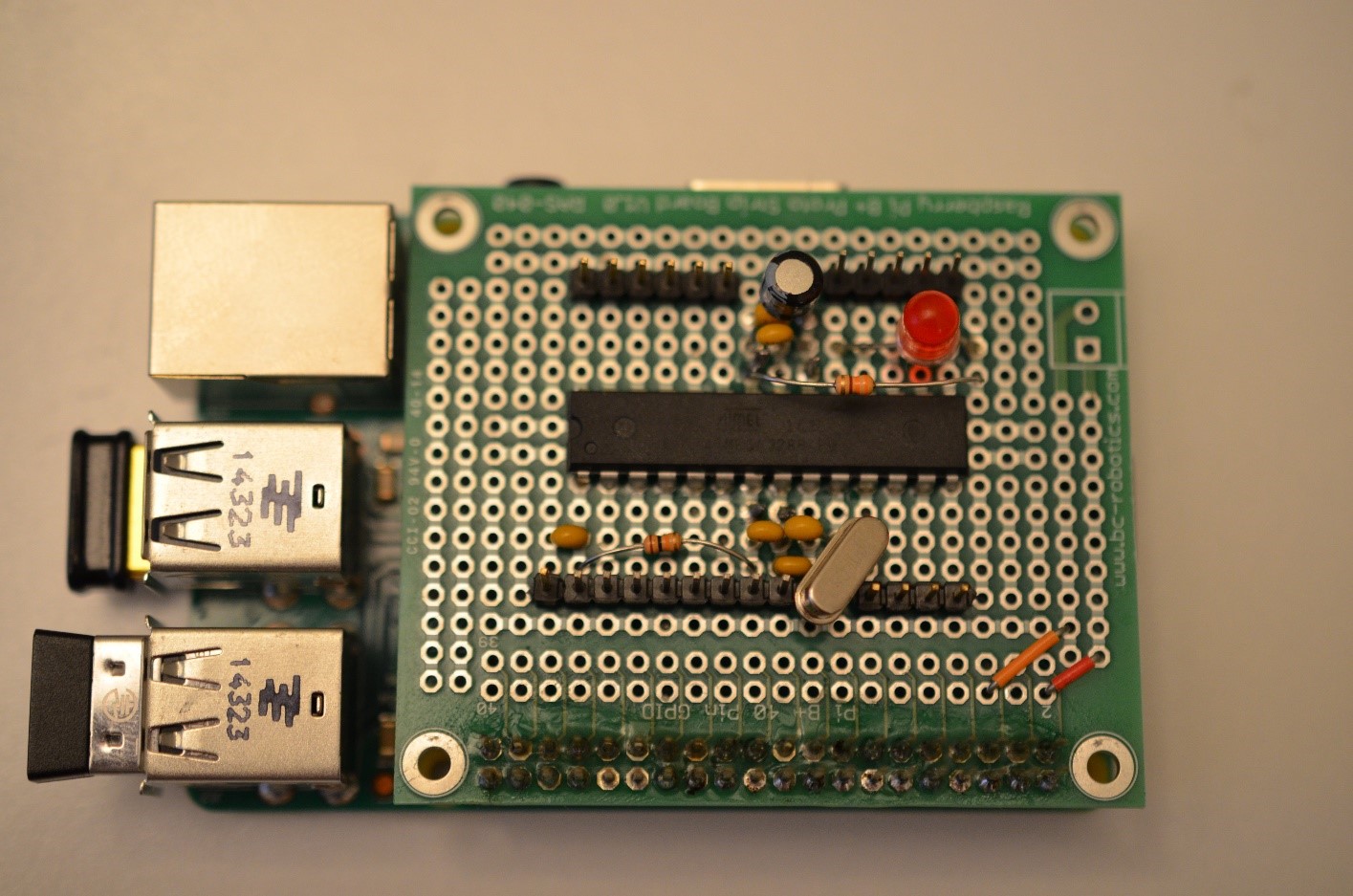
Just one advice there: assemble everything using a breadboard because Raspberry Proto Strip Board has similar architecture. Once you have tested your circuit it’s possible to move all components to the strip board one by one.
In 30 minutes I got this:
Now you can use USB to Serial in order to apply all needed software to your Arduino. It depends on the method you select to make a connection between Arduino and Raspberry. For example, you can use StandardFirmata sketch, which is installed with Arduino SDK and you can use I2C or Serial communications.
In case of my drone, probably, I will create my own software for Arduino because I want to implement all stabilization algorithms there and I have another important tasks for Raspberry. Because I discovered some problems with serial pins on Raspberry + Windows 10 (you still can use USB to Serial converter but….) I decided to connect Raspberry and Arduino I2C pins using simple wires. Once I select the right communication protocol I will use soldering iron to fix connection between Raspberry and Arduino.
Finally, I have ordered one more Strip Board to make one more shield with all needed sensors which will be connected to Arduino. And right after that I may forget about hardware and pay all my attention to software where I will use C#, Universal Windows Platform and Visual Studio – all things that I like!
In summary I want to emphasize two things:
There are no problems with specific hardware features – just do it!
If I decide to create a commercial version of my drone, I will hire some engineers and ask them to make my own board which will be ready for Windows 10 IoT core and will contain all needed sensors.